
TURTLE 8-Wheeled Base
(→Overview) |
(→Overview) |
||
| Line 74: | Line 74: | ||
The eight-wheels system is a redesign of the three wheeled version of the Tech United RoboCup Team Limited Edition (TURTLE) robots. As such, the base has been reconsidered, while the [[TURTLE Upper Body|the upper body]] and the [[TURTLE Ball Handling and Kicking Mechanism|the ball handling and kicking mechanism]] have been reused. Therefore, the focus of the hardware elaborated on this page is on the wheel sets and the assembly of the entire system. | The eight-wheels system is a redesign of the three wheeled version of the Tech United RoboCup Team Limited Edition (TURTLE) robots. As such, the base has been reconsidered, while the [[TURTLE Upper Body|the upper body]] and the [[TURTLE Ball Handling and Kicking Mechanism|the ball handling and kicking mechanism]] have been reused. Therefore, the focus of the hardware elaborated on this page is on the wheel sets and the assembly of the entire system. | ||
| − | This platform consists of four wheel sets, each having two hub-drive wheels. As such, the platform is five times over-constrained. To avoid an over-constrained design, each wheel set has an internal degree of freedom. This degree of freedom is visualized in Figure 1 by the white lines. The last platform-constraint is addressed by a hinging axle at the back of the robot, which is shown in Figure 3. By using slip rings for powering the wheel sets and communicating the actuation signals, the rotation of the wheels is | + | This platform consists of four wheel sets, each having two hub-drive wheels. As such, the platform is five times over-constrained. To avoid an over-constrained design, each wheel set has an internal degree of freedom. This degree of freedom is visualized in Figure 1 by the white lines. The last platform-constraint is addressed by a hinging axle at the back of the robot, which is shown in Figure 3. By using slip rings for powering the wheel sets and communicating the actuation signals, the rotation of the wheels is unconstrained in both directions. |
Revision as of 09:37, 26 March 2020
| Robot Links |
| Author |
| TU/e |
| CST Group, TU/e |
| CAD Files |
| STEP |
| Electronic Drawings |
| Software |
| Software |
| low_level_control_lib.slx |
| Software Flow Charts |
| Scheme |
| Motion |
| Vision |
| World Model |
| License |
| License Files |
TURTLE: Base | Upper Body | Ball Handling and Kicking Mechanism | Goalkeeper | 8-Wheeled Base
Contents |
Robot Summary
As an alternative for the three-wheeled base of the RoboCup Middle Size League soccer robots of Tech United Eindhoven, an eight-wheeled version was designed consisting of four wheel sets, each having two hub-drive wheels. Figure 1 depicts such a wheel set, whereas the realization of the system is shown in Figure 2. The main advantages compared to the three-wheeled platform are the possibility to apply the torque delivered by the motors in the desired direction in order to achieve a higher acceleration in this direction.
- Author: Group, TU/e
- License: CERN OHL v.1.1
- Software: http://robocup.wtb.tue.nl/svn/techunited/
- Simulink Control Implementation: low_level_control_lib.slx
Contributions in publications about this platform can be found in
Houtman W. et al. (2019) Tech United Eindhoven Middle-Size League Winner 2019. In: Chalup S., Niemueller T., Suthakorn J., Williams MA. (eds) RoboCup 2019: Robot World Cup XXIII. RoboCup 2019. Lecture Notes in Computer Science, vol 11531. Springer, Cham
Douven Y. et al. (2019) Tech United Eindhoven Middle Size League Winner 2018. In: Holz D., Genter K., Saad M., von Stryk O. (eds) RoboCup 2018: Robot World Cup XXII. RoboCup 2018. Lecture Notes in Computer Science, vol 11374. Springer, Cham

Figure 1: Wheel Set, including the passive lateral degree of freedom indicated with the white (dotted) lines and the rotational degree of freedom which can be manipulated by a force difference applied to the ground by both wheels.
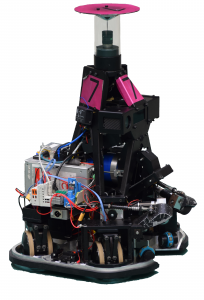
Figure 2: Realization of the system


3D Viewer
Overview
The eight-wheels system is a redesign of the three wheeled version of the Tech United RoboCup Team Limited Edition (TURTLE) robots. As such, the base has been reconsidered, while the the upper body and the the ball handling and kicking mechanism have been reused. Therefore, the focus of the hardware elaborated on this page is on the wheel sets and the assembly of the entire system.
This platform consists of four wheel sets, each having two hub-drive wheels. As such, the platform is five times over-constrained. To avoid an over-constrained design, each wheel set has an internal degree of freedom. This degree of freedom is visualized in Figure 1 by the white lines. The last platform-constraint is addressed by a hinging axle at the back of the robot, which is shown in Figure 3. By using slip rings for powering the wheel sets and communicating the actuation signals, the rotation of the wheels is unconstrained in both directions.

Specifications
Wheel Sets
• Wheel radius: 0.056 meter
• Lateral wheel distance: 0.056 meter
• Motor velocity constant: 135 revolutions per minute per volt
• Motor torque constant: 135 Newton meter per ampere
• Motor resistance: 0.072 Ohm
Communication
Custom EtherCat module consisting of
Observed signals:
• Measured orientation of the wheel set (19 bit encoder)
• Measured position of each wheel (16 bit encoder)
• Measured velocity of each wheel
• Safe torque off status
• Warning & error status
• Measured Negative Temperature Coefficient (NTC) resistor for temperature observations
Actuation Signals:
• Control Mode: position, velocity or current control
• Corresponding setpoint
License
Copyright Eindhoven University of Technology 2020.
This documentation describes Open Hardware and is licensed under the CERN OHL v. 1.1.
You may redistribute and modify this documentation under the terms of the CERN OHL v.1.1. (http://ohwr.org/cernohl).
This documentation is distributed WITHOUT ANY EXPRESS OR IMPLIED WARRANTY, INCLUDING OF MERCHANTABILITY, SATISFACTORY QUALITY AND FITNESS FOR A PARTICULAR PURPOSE. Please see the CERN OHL v.1.1 for applicable conditions.