
TURTLE 8-Wheeled Base
| Robot Links |
| Author |
| TU/e |
| CST Group, TU/e |
| CAD Files |
| STEP |
| Electronic Drawings |
| Software |
| Software |
| Software Flow Charts |
| Scheme |
| Motion |
| Vision |
| World Model |
| License |
| License Files |
TURTLE: Base | Upper Body | Ball Handling and Kicking Mechanism | Goalkeeper | 8-Wheeled Base
Contents |
Robot Summary
As an alternative for the three-wheeled base RoboCup Middle Size League soccer robots of Tech United Eindhoven, an eight-wheeled version was designed consisting of four wheel sets, each having two hub-drive wheels, thus being five times over-constrained. To avoid an over-constrained design, each wheel set has an internal degree of freedom. The last constraint is addressed by a hinging axle at the back of the robot. The main advantages compared to the three-wheeled platform are the possibility to apply the torque delivered by the motors in the desired direction in order to achieve a higher acceleration in this direction.
- Author: Group, TU/e
- License: CERN OHL v.1.1
- Software: http://robocup.wtb.tue.nl/svn/techunited/
- Simulink Control Implementation: low_level_control_lib.slx
Contributions in publications about this platform can be found in
Houtman W. et al. (2019) Tech United Eindhoven Middle-Size League Winner 2019. In: Chalup S., Niemueller T., Suthakorn J., Williams MA. (eds) RoboCup 2019: Robot World Cup XXIII. RoboCup 2019. Lecture Notes in Computer Science, vol 11531. Springer, Cham
Douven Y. et al. (2019) Tech United Eindhoven Middle Size League Winner 2018. In: Holz D., Genter K., Saad M., von Stryk O. (eds) RoboCup 2018: Robot World Cup XXII. RoboCup 2018. Lecture Notes in Computer Science, vol 11374. Springer, Cham

Figure 1: Wheel Set
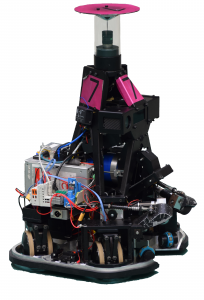
Figure 2: Realization of the system


License
Copyright Eindhoven University of Technology 2020.
This documentation describes Open Hardware and is licensed under the CERN OHL v. 1.1.
You may redistribute and modify this documentation under the terms of the CERN OHL v.1.1. (http://ohwr.org/cernohl).
This documentation is distributed WITHOUT ANY EXPRESS OR IMPLIED WARRANTY, INCLUDING OF MERCHANTABILITY, SATISFACTORY QUALITY AND FITNESS FOR A PARTICULAR PURPOSE. Please see the CERN OHL v.1.1 for applicable conditions.